

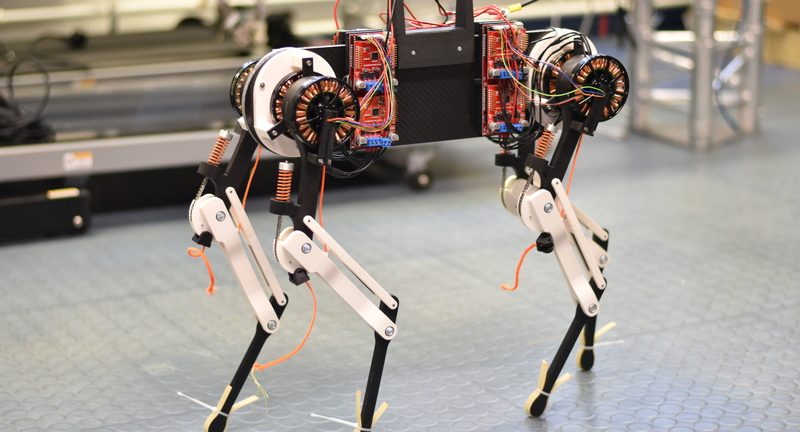
जर्मनी के एक कॉलेज के वैज्ञानिकों की जिज्ञासा का नहीं है कोई जवाब यह पता लगाने के लिए कि जानवर कैसे चलना सीखते हैं। उन्होंने चार पैरों वाला, कुत्ते के आकार का रोबोट ही बना दिया। शोध के निष्कर्ष ‘नेचर मशीन इंटेलिजेंस’ पत्रिका में प्रकाशित हुए थे। शिकारियों से बचने के लिए एक नवजात जिराफ़ या बछेड़े को अपने पैरों पर जितनी जल्दी हो सके चलना सीखना चाहिए। जानवरों का जन्म उनकी रीढ़ की हड्डी में स्थित मांसपेशी समन्वय नेटवर्क के साथ होता है। हालांकि, पैर की मांसपेशियों और टेंडन के सटीक समन्वय को सीखने में कुछ समय लगता है। प्रारंभ में, शिशु जानवर हार्ड-वायर्ड रीढ़ की हड्डी की सजगता पर बहुत अधिक निर्भर करते हैं। जबकि कुछ अधिक बुनियादी, मोटर नियंत्रण सजगता जानवर को अपने पहले चलने के प्रयासों के दौरान गिरने और खुद को चोट पहुंचाने से बचने में मदद करती है।
निम्नलिखित, अधिक उन्नत और सटीक मांसपेशी नियंत्रण का अभ्यास किया जाना चाहिए, जब तक कि अंततः तंत्रिका तंत्र युवा जानवर के पैर की मांसपेशियों और टेंडन के लिए अच्छी तरह से अनुकूलित न हो जाए। कोई और अनियंत्रित ठोकर नहीं – युवा जानवर अब वयस्कों के साथ रह सकता है।
MPI-IS में डायनेमिक लोकोमोशन रिसर्च ग्रुप के पूर्व डॉक्टरेट छात्र फेलिक्स रूपर्ट ने कहा, “इंजीनियरों और रोबोटिस्टों के रूप में, हमने एक ऐसे रोबोट का निर्माण करके जवाब मांगा, जो जानवरों की तरह ही रिफ्लेक्सिस की सुविधा देता है और गलतियों से सीखता है।” “अगर कोई जानवर ठोकर खाता है, तो क्या यह गलती है? अगर यह एक बार होता है तो नहीं। लेकिन अगर यह बार-बार ठोकर खाता है, तो यह हमें मापता है कि रोबोट कितनी अच्छी तरह चलता है।”